Adaptive on-line performance evaluation of video
trackers
[Description][Related publication][Dataset][Sample results][Software][Additional references]
This page presents
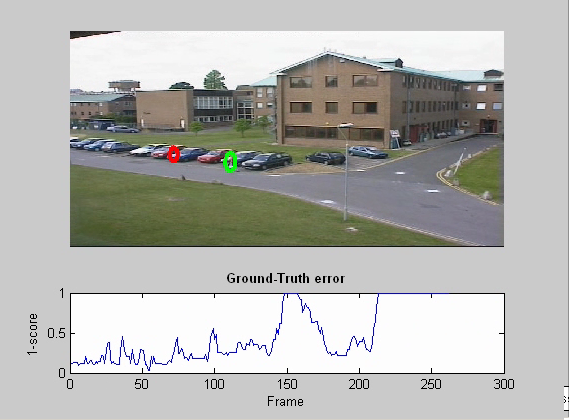
sample results of our framework to evaluate the performance of tracking
algorithm without using ground-truth data (named ARTE, Adaptive Reverse
Tracking Evaluation). The framework is divided into two main stages,
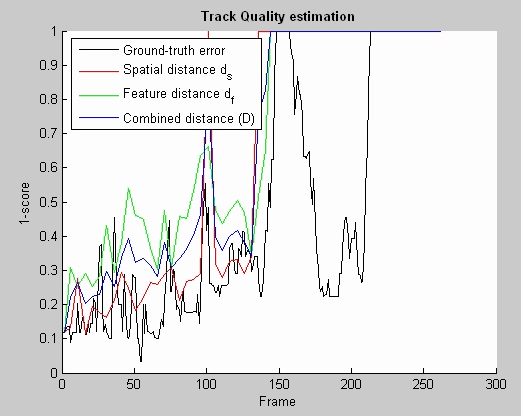
namely the estimation of the tracker condition to identify intervals during
which a target is lost and the measurement of the quality of the estimated
track when the tracker is successful. A key novelty of the proposed framework
is the capability of evaluating video trackers with multiple failures and
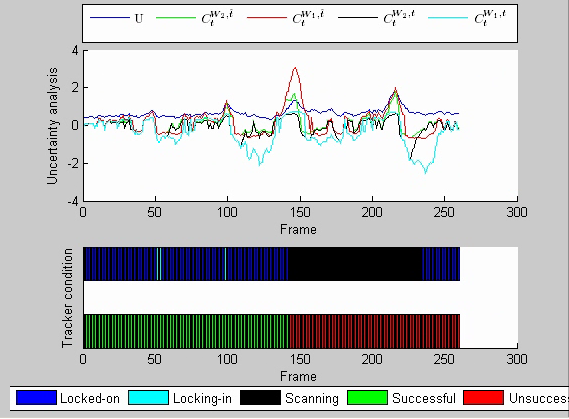
recoveries over long sequences. Successful tracking is identified by analyzing
the uncertainty of the tracker, whereas track recovery from errors is
determined based on the time-reversibility constraint.
Original test sequences with ground truth data and a
MATLAB implementation are also provided.
Adaptive on-line performance evaluation of video
trackers [link]
J. SanMiguel, A. Cavallaro
and J. Martínez
IEEE Transactions on Image Processing , 21(5): 2812-2823, May
2012
Contact Information
Juan C. SanMiguel - show
email
CAVIAR dataset: targets P1 (Browse_WhileWaiting1), P2
(OneLeaveShopReenter1front), P3 (OneLeaveShopReenter2front), P4
(ThreePastShop2cor) are available here
PETS2001 dataset: targets P5-P10 (Camera1_testing) are
available here
PETS2010 dataset: targets P11-P14 (S2_L1_view001), P15-P16 (S2_L2_view0001)
and P17-P18 (S2_L3_view001) are available here
Targets F1 (seq_bb), F2 (seq_mb),
F3 (seq_sb) and F4 (seq_villains2) are available here
VISOR dataset: targets F5 (visor_video_1) and F6 (visor_video_2) are
available here
The ground-truth for all the targets in the dataset is
available here
Download the videos1 and images from the links
below to look at the sample experimental results of our proposed framework. A
color-based particle filter was used to generate the tracking results [1].
Additionally, a comparison with representative state-of-the-art approaches
for empirical standalone quality evaluation (Observation Likelihood (OL) [2],
covariance of the target state (SU) [3], frame-by-frame reverse-tracking
evaluation using template inverse matching (TIM) [4] and full-length
reverse-tracking evaluation using the same applied tracking algorithm (FBF)
[5]) is included.
1The XviD ISO MPEG-4 codec is needed to watch the video files
(download it here)
The software listed in this section can be freely used
for research purposes.
Two separate tools are provided for the main stages
described in the paper (also available in GitHub):
- Tracker condition estimator (MATLAB implementation)
- Track quality estimator ( MATLAB implementation)
Additionally, the implementation of the particle
filter tracker and data needed for the above tools are provided:
- The MATLAB implementation of the color-based
particle filter tracker used to generate the tracking data is available here*
- Data (sequence, ground-truth and tracking data)
*If you use this software, please
cite the related reference.
References
[1] K. Nummiaro, E. Koller-Meier, and E. Van Gool,
“An adaptive colour-based particle filter,” in Image
and Vision Computing, 21(1):99–110, 2003.
[2] N. Vaswani, “Additive change detection in
nonlinear systems with unknown change parameters,” in IEEE Trans. on Signal
Processing, 55(3):859–872, 2007.
[3] E. Maggio, F. Smerladi,
and A. Cavallaro, “Adaptive multifeature
tracking in a particle filtering framework„” in IEEE Trans. on Circuits and
Systems for Video Technology, 17(10):1348–1359, 2007.
[4] R. Liu, S. Li, X. Yuan, and R. He,
“Online determination of track loss using template inverse matching,” in Proc.
of the Int. Workshop on Visual Surveillance, Marseille (France), 17 October
2008.
[5]H. Wu, A. Sankaranarayanan,
and R. Chellappa, “Online empirical evaluation of
tracking algorithms,” in IEEE Trans. on Pattern Analysis and Machine
Intelligence, 32(8):1443–1458, 2010.