A single-object video tracking dataset





Content
|
This section presents, via the left menu, a description of the test sequences for each modeled situations along with frame samples, low resolution video previews and the event annotations. Annotations have been done using the VIPER toolkit and modified later. Currently,
the
dataset contains 126 sequences related with the single-object video
tracking task (with around 22000 frames annotated). These
sequences represent the common problems
in
video tracking in different testing situations. We distinguish
four
situations:
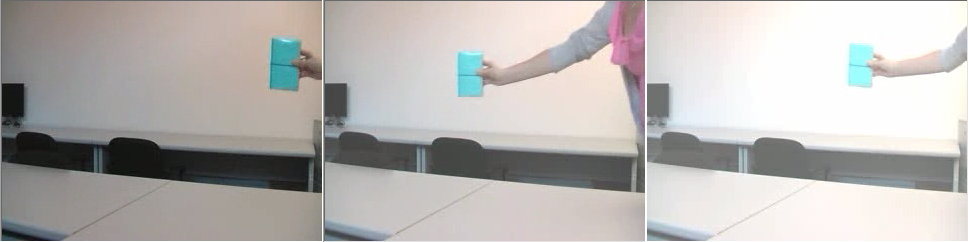
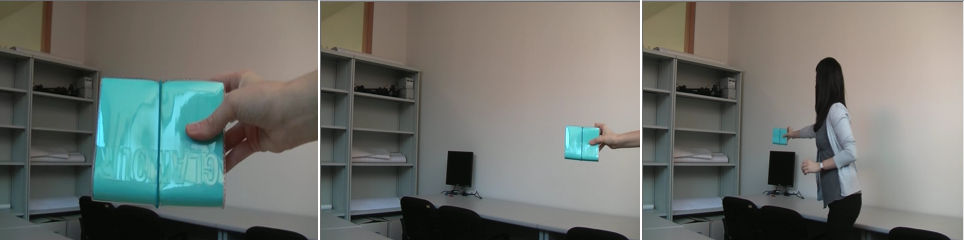
Sample frames from
each situation are shown in the following images: Situation 1: 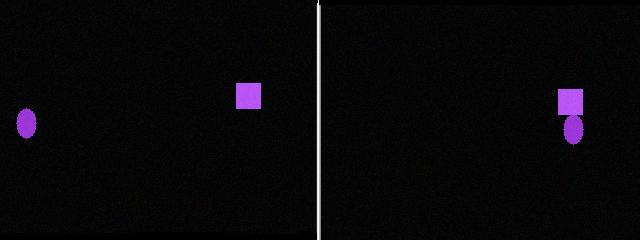
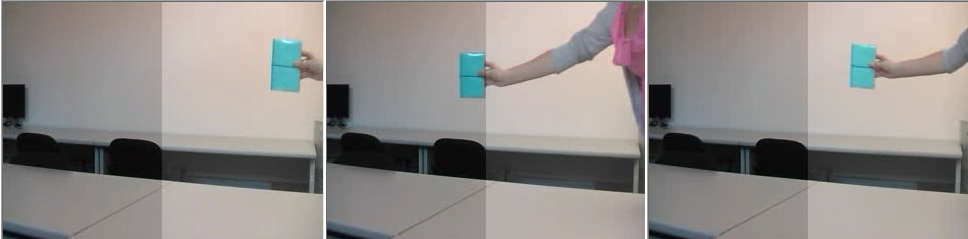
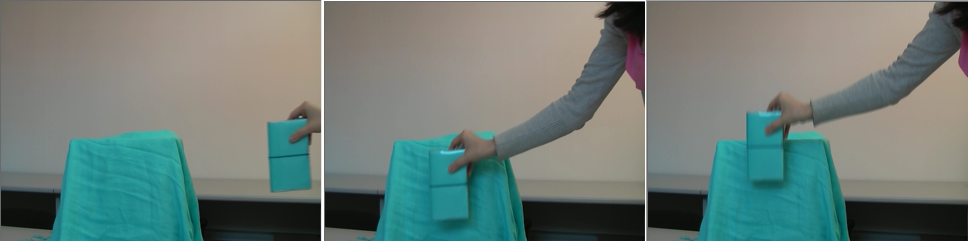
Situation 2:
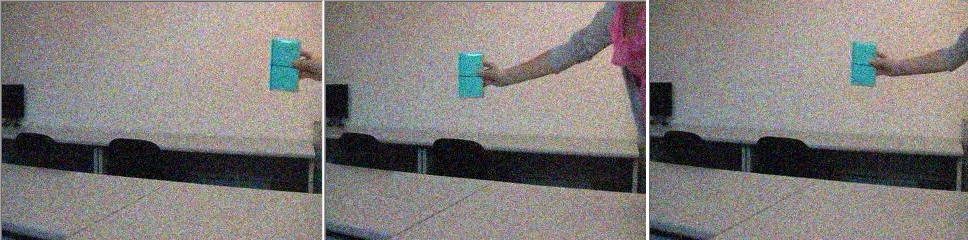
Situation 3:
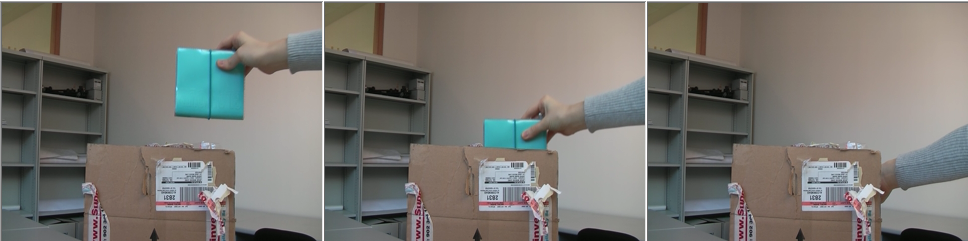
Situation 4:
Several
tracking-related problems
are included in the sequences in order to evaluate the adaptability of
the
algorithms to real life problems. They include complex movement
of the
target, global and local illumination changes, noise, occlusions, scale
changes
and similar objects in the background. For estimating the complexity of
such problems in each sequence, some criteria have been
defined (available here). Complex Movement
Global Illumination Changes
Local Illumination Changes
Noise
Occlusion
Scale Changes
Similar Objects
Ground-truth annotation format Nfr ObjID Label X Y W H Angle
2 1 ellipse 22 125 20 30 0 3 1 ellipse 23 128 20 30 0 ObjID:
|